-
[Controls]PID 제어 / PID ControlsControls 2022. 6. 9. 23:38728x90반응형
안녕하세요
오늘은 제어의 꽃이라 불리는 PID 제어에 대해 개념적으로만 한번 알아보도록 하겠습니다.
1. 개념
PID란 Proportional / Integral / Differential 의 줄임말로 즉 비례/적분/미분 제어기라 합니다. 실제 여러 산업군에서 사용되며, PLC의 경우 각 메이커마다 자체의 PID 제어 함수를 제공하고 있고. Micro processor를 이용한 개발을 할 경우에는 Github 같은 곳에 오픈소스로 많이 제공되고 있으니 가져다가 쓰면 되겠습니다.
하지만 오픈소스/제공된 함수를 가져다 쓸때 쓰더라도 그 원리와 개념정도는 이해하고 있는게 참된 엔지니어의 길이라 할 수 있겠으니, 저도 공부하고 이 글을 읽고 계시는 여러 산업직종에 몸담고 계시는 분들도 공부하는 의미에서 가볍게 한번 정리해보겠습니다.
2. 구조

PID 제어기를 도식화한 그림이다. 결국 PID는 Process를 원하는 값에 맞추는데 목적이 있다. 단순히 이 Process의 온도가 몇도에 맞추는지, 밸브를 몇 % 개방할껀지등이 아닌 Heater 의 온도를 맞추거나, 탱크의 레벨을 맞추거나할 때 사용한다.
즉, 탱크에 일정한 수위를 유지하고 싶을 때, 탱크의 레벨을 확인하여 그 레벨값을 PID 함수에 Feedback을 주고, 그 Feedback 값과 Setpoint를 연산하고 PID 계수에 맞춰서 밸브를 Open/Close 하고, 그때의 Tank 레벨을 확인하고 다시 Feedback 값을 주고 . . . . . .
이짓을 계속해서 수행하는 것이 PID 제어기의 목적이자 제어 포인트라 생각하면 된다.
3. 수식
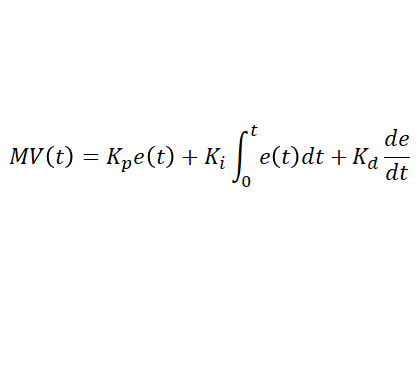
이 항들은 각각 오차값, 오차값의 적분, 오차값의 미분에 비례한다.

(비례항): 현재 상태에서의 오차값의 크기에 비례한다


(적분항): 정상상태 오차를 없애는 작용을 한다.
(미분항): 출력값의 급격한 변화에 발산(Overshoot)을 방지하여 Stability를 향상 시킨다.
즉, 비례항은 오차값에 곱해주고, 적분항은 오차값을 누적하고, 미분항은 오차값을 잘게 쪼개는 역할을 한다.

<출처 : 위키피디아> 4. 튜닝
결국 우리는 이러한 수식을 정확하게 이해하였던, 이해하지 못하였던 결국엔 Process를 원하는 값으로 맞춰줘야 하는데 목적이 있다. Kp, Ki, Kd를 Gain 이라 하며, 이 파라미터값을 조정하여 흔들리지 않고 우리가 원하는 Set point에서 일정하게 유지되도록 하는 것이 결국 PID의 목적이라 생각하면 된다.
하지만, 이 Gain값을 맞춰주는 것은 보통일이 아닌데 결국 수식적/실험적/경험적 방법을 통해 게인값을 셋팅하고 이 또한 여러 PLC 메이커에서 자동으로 Gain값을 맞춰주는 솔루션을 제공하기도 한다.
그 상황에 맞게 비레 제어 (P제어), 비례 적분제어 (P-I 제어) 등 다양하게 적용이 가능하다.
5. 마무리
다음시간에는 이 Gain값을 설정하는 방법에 대해 알아보도록 하겠다.
728x90반응형'Controls' 카테고리의 다른 글
[Cotnrols] PackML Standard(표준) 이란? (0) 2024.07.05 [Control] 아날로그(4-20mA) 를 디지털 신호로 변환 (A/D Converting) (0) 2024.05.31 Roll to Roll 설비에서 Roll 지름 계산 방법 (0) 2022.10.18 [Controls]Open loop Control 과 Close Loop Control의 개념 (0) 2022.06.23 [Controls]엔코더를 활용한 지름 계산 / Diamater Calculation with Encoder (0) 2022.05.24